협동 로봇 그리퍼 – ISC 이너 소프트 클램프 협동 로봇 팔 그리퍼



주요 카테고리
산업용 로봇 팔 / 협동 로봇 팔 / 전동 그리퍼 / 지능형 액추에이터 / 자동화 솔루션 / 협동 로봇 팔 그리퍼 / 소프트 그리퍼 / 로봇 팔 그리퍼
애플리케이션

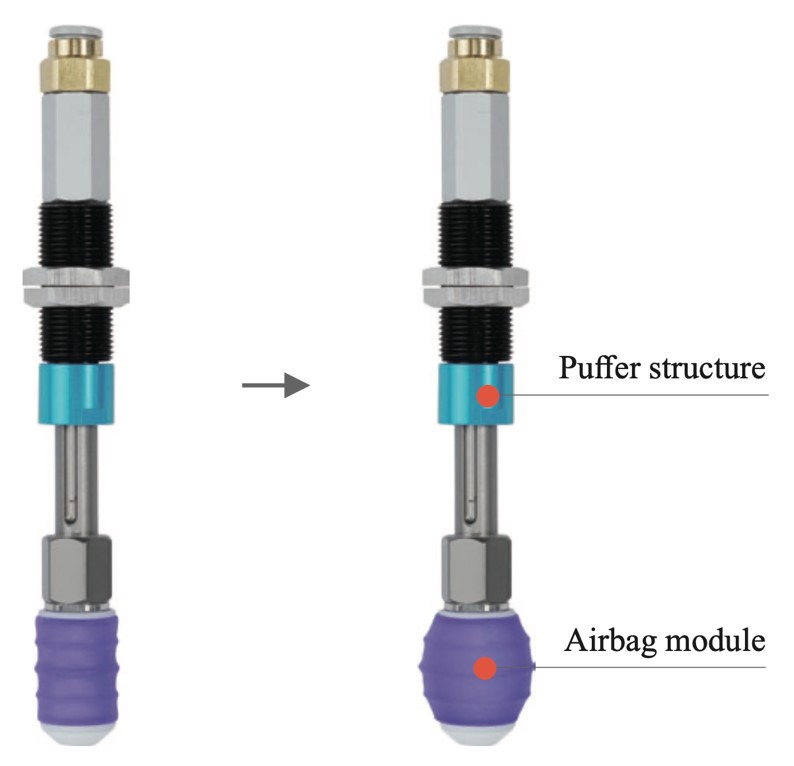
ISC 내부 지지 클램프는 복어의 자기 방어 형태를 모방한 혁신적인 연성 고정 장치입니다. 압력을 가해 공기를 주입하면 고정 장치가 팽창하여 내부 지지력을 확보할 수 있습니다.
공작물과 접촉하는 부분이 부드러운 실리콘 고무 재질이기 때문에, 압력을 가하면 단단한 지지대와 접촉면 사이에 "에어 쿠션" 층이 형성되어 응력이 고르게 분산되고 공작물 손상 가능성이 줄어듭니다. 또한, 입력 공기압을 조절하여 에어백의 팽창과 공작물과의 접촉 응력을 제어할 수 있으므로 파지 시스템의 유연성을 크게 향상시킬 수 있습니다.
특징

·드라이빙 미디어: 깨끗한 공기
• 표준 작동 수명: 10만 회 이상
• 최대 작동 주파수(cpm): 300
● 내부 지지 클램프는 특수 에어백 구조를 가지고 있으며 내부 압력에 따라 다양한 변형을 일으킬 수 있습니다.
● 양압 입력: 고정 장치가 확장되어 물체의 내부 표면을 자체적으로 지지하고 파지를 완료합니다.
● 음압 입력: 고정 장치가 자연 상태를 유지하고 물체를 해제합니다.
SFG 소프트 그리퍼는 다음과 같은 세계적 수준의 협동 로봇 팔에 적용되어 왔습니다.

4축 수평(SCARA) 로봇 델타
산업용 로봇 팔 후지코시 나치
4축 병렬(델타) 로봇 ABB
6축 협동 로봇 UR
6축 협동 로봇 AUBO



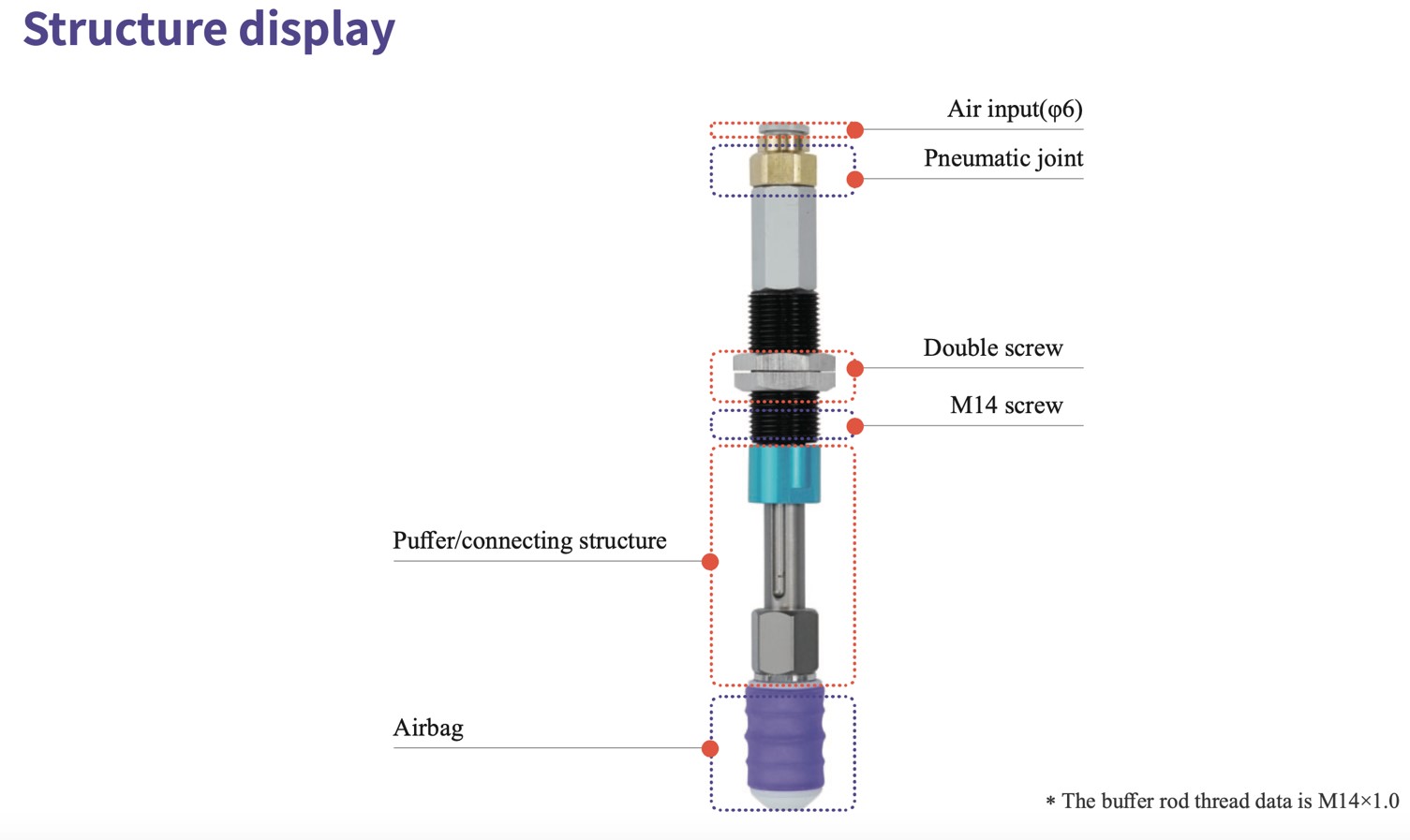
사양 매개변수
ISC 에어백 내부 지지 클램프는 복어의 자기 방어 형태를 모방한 혁신적인 연성 고정 장치입니다. 압력을 가해 공기를 주입하면 고정 장치가 팽창하여 내부에서 안정적으로 고정할 수 있습니다. 주입되는 공기의 압력을 정밀하게 제어할 수 있어 고정 장치가 가공물에 가하는 파지력을 조절할 수 있으므로 가공물 손상을 최소화할 수 있습니다.
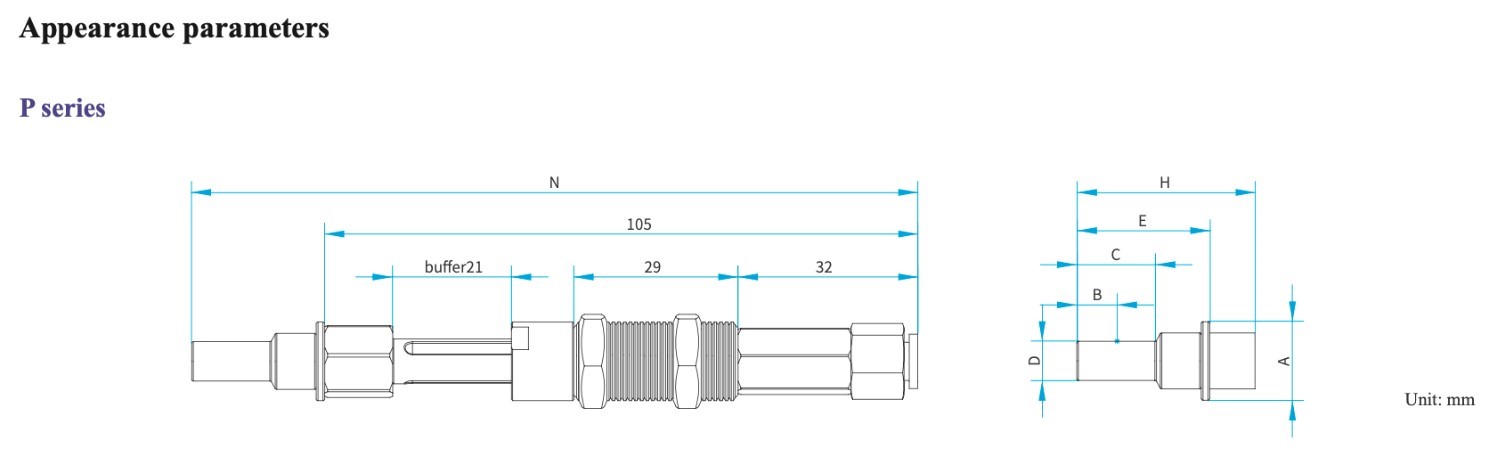
| 모델 | 에어백 모듈의 전체 높이 H | 접촉면 직경 D | 구조부 A의 직경 | 작업 직경에서 바닥 B까지의 높이 | 유효 접촉면의 높이 C | 에어백 작동 높이 모듈 E | 총 길이 N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
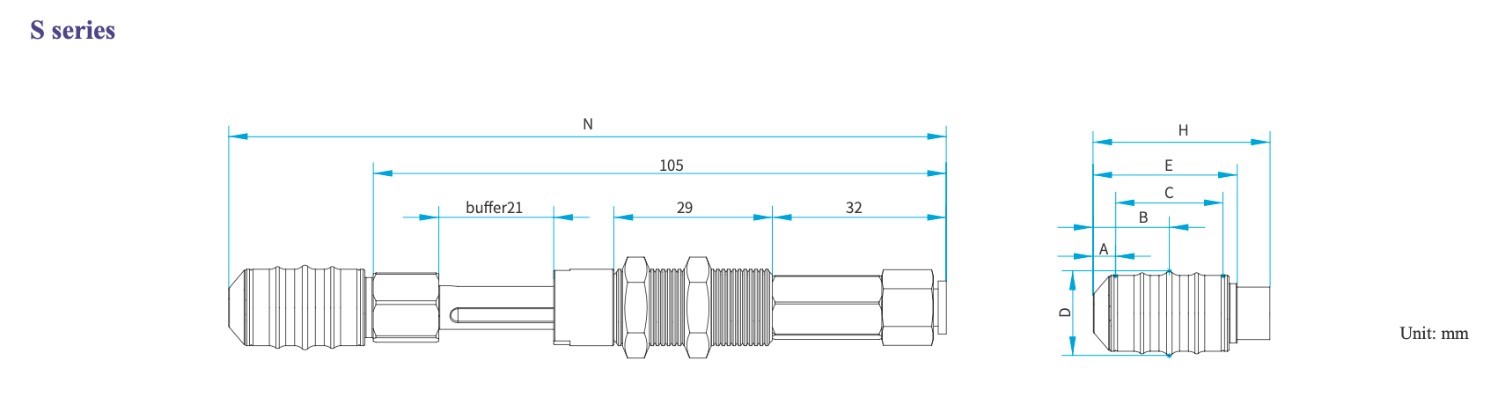
| 모델 | 에어백 모듈의 전체 높이 H | 접촉면 직경 D | 가이드 높이 A | 작업 직경에서 바닥 B까지의 높이 | 유효 접촉면의 높이 C | 에어백 작동 높이 모듈 E | 총 길이 N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
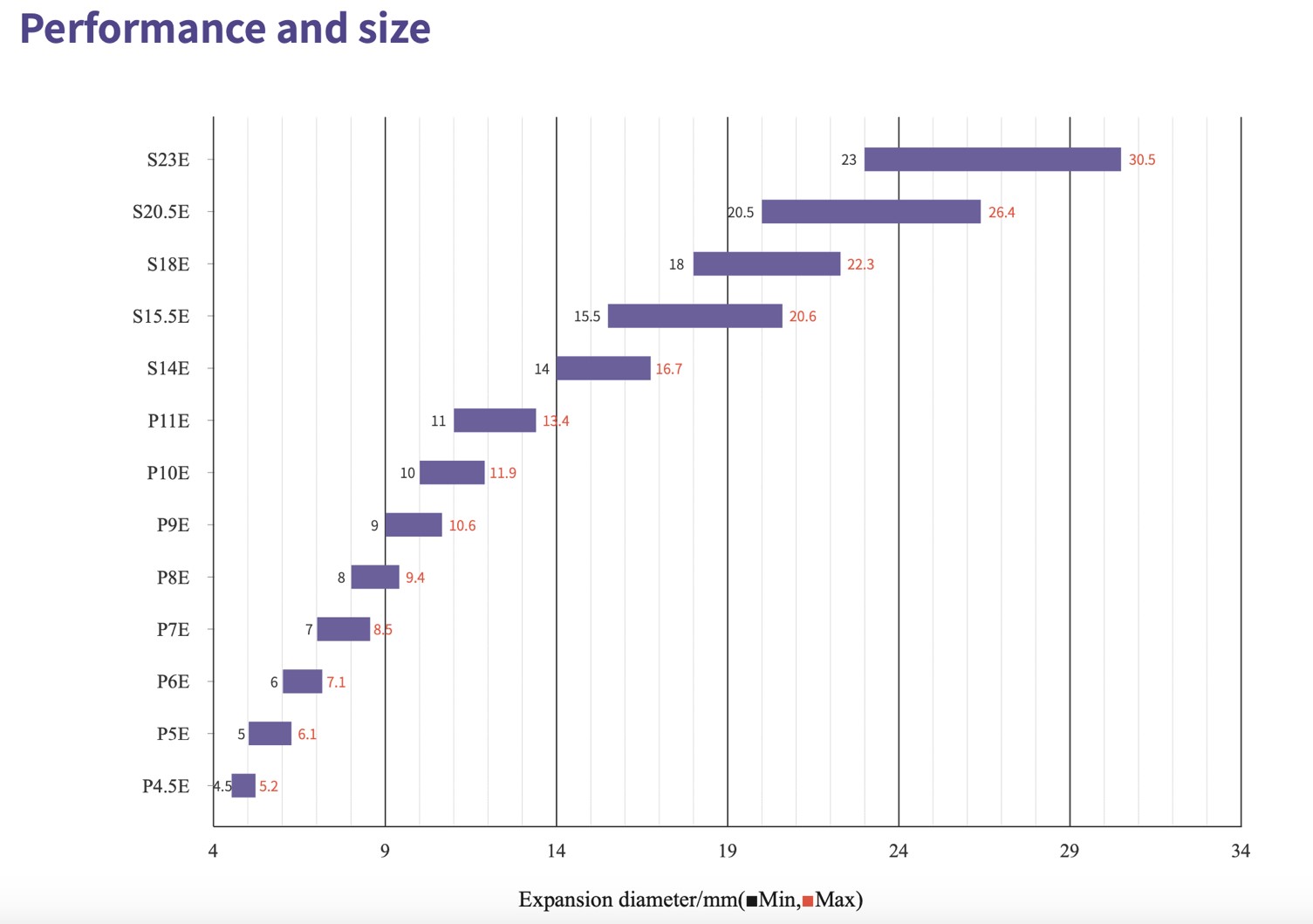
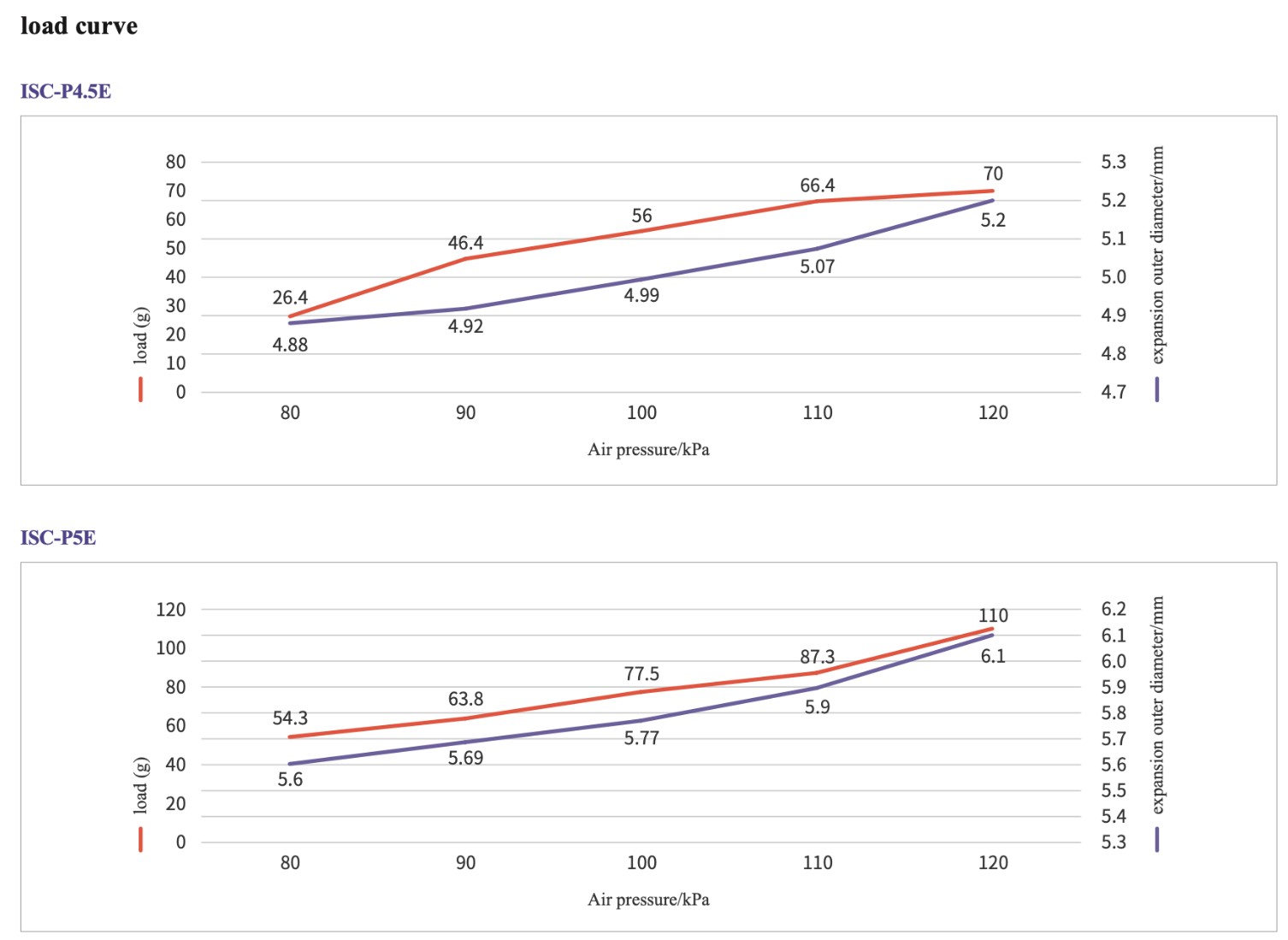
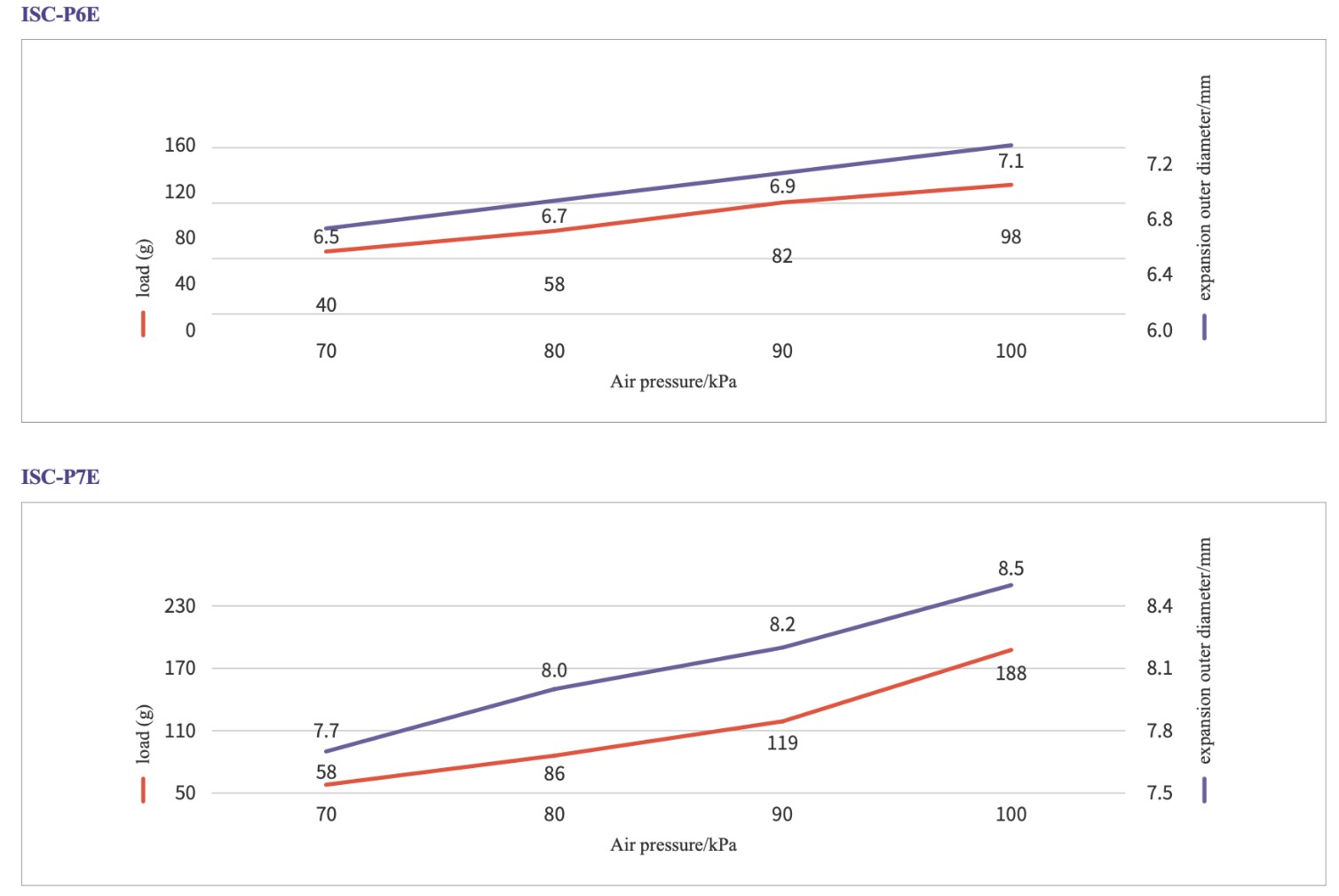
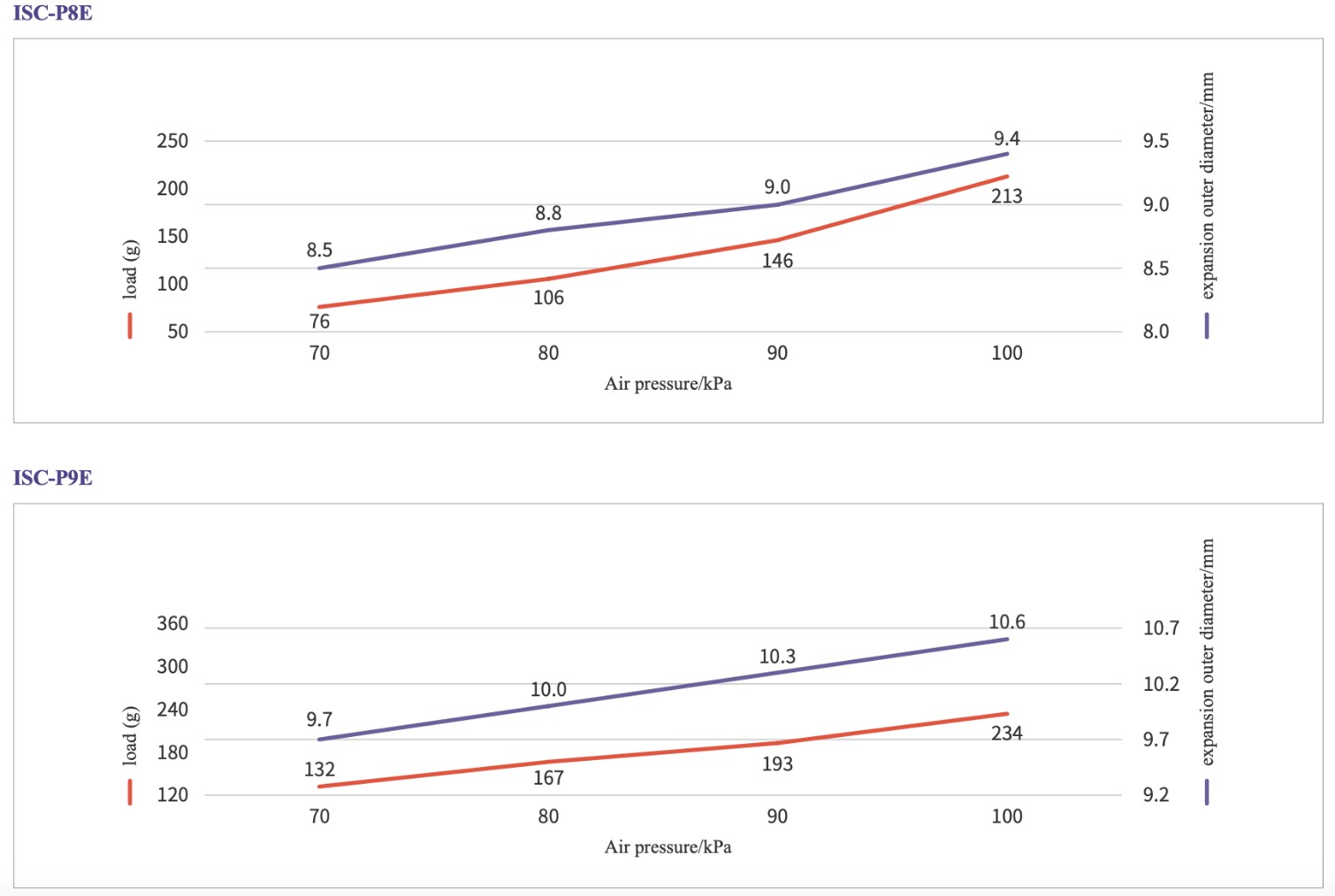
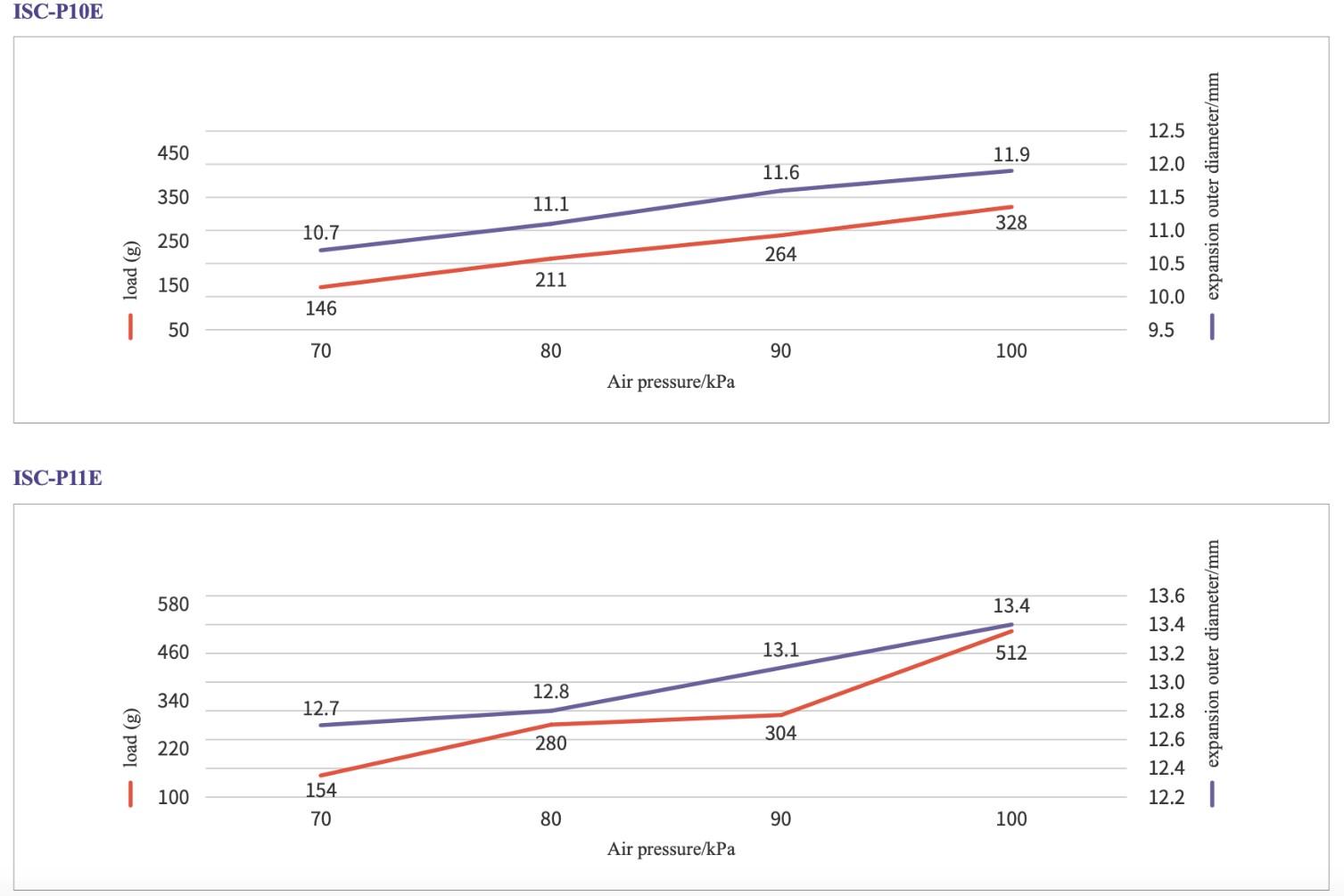
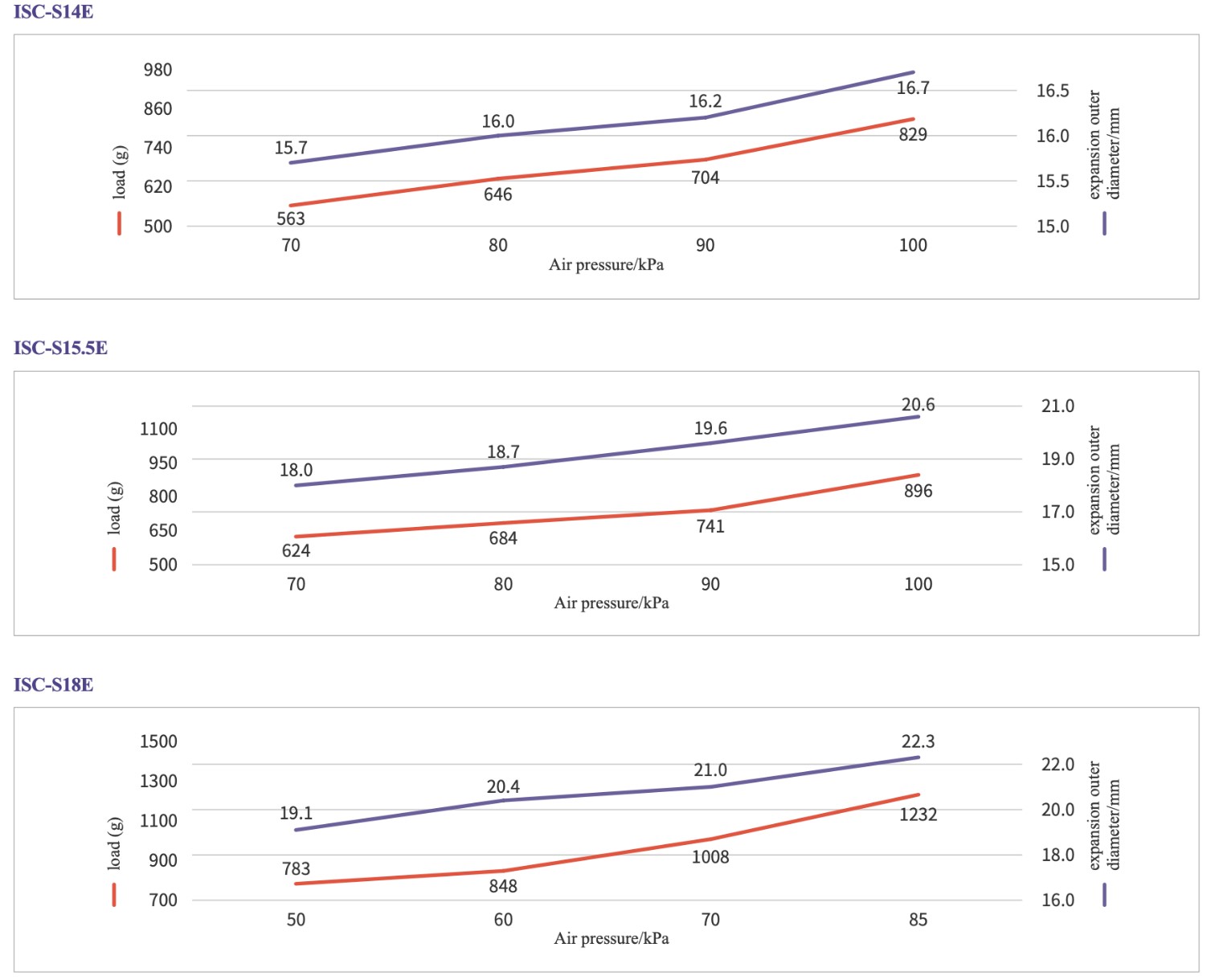
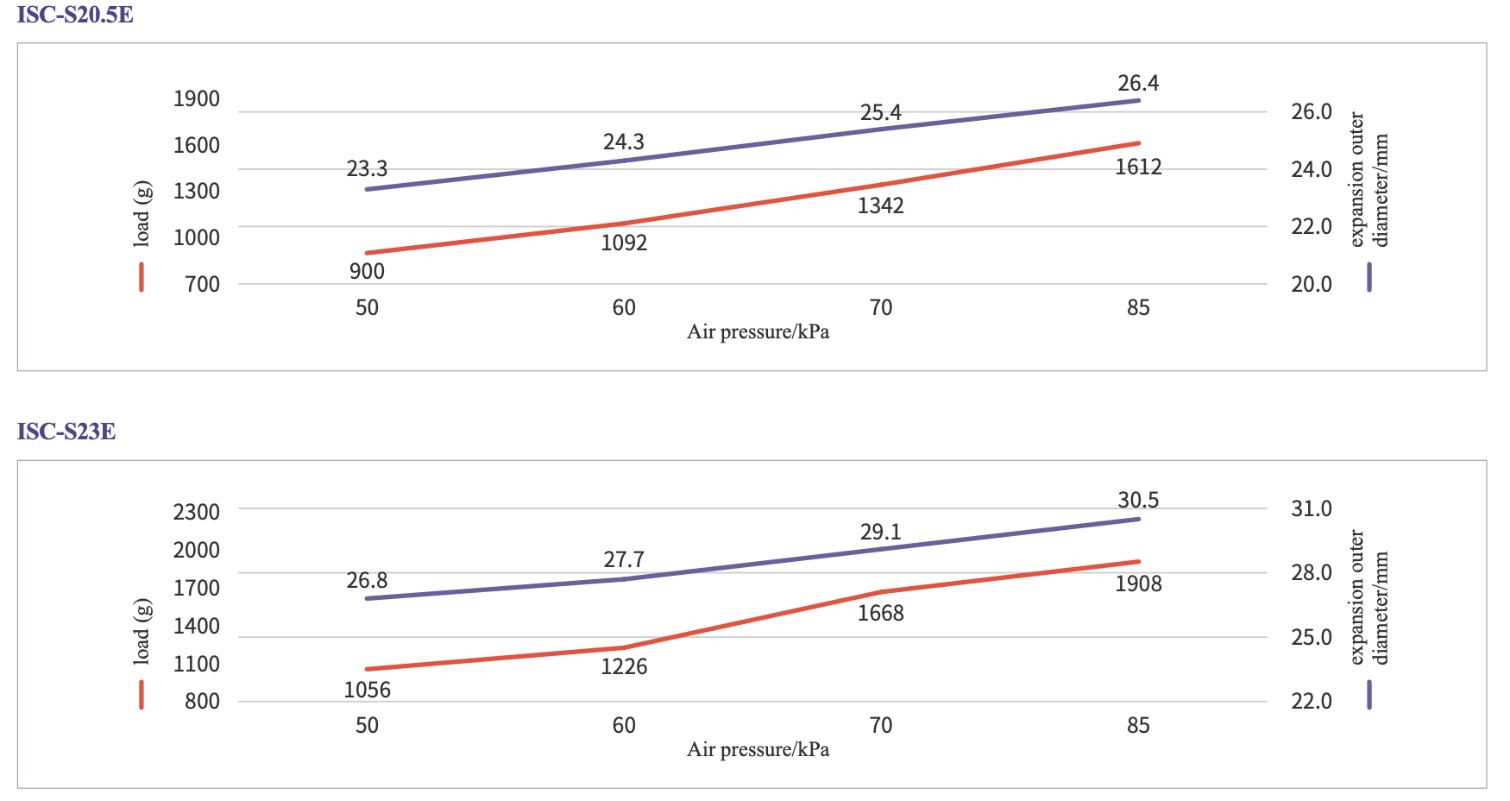
확장된 외경
| 모델 | 작동 압력 범위 /kPa | 최대 확장 외경/mm | 최대 하중/g | 조명기구 무게/g | 금속 막대 모형 | 장착 구멍 치수/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* P 시리즈 최대 하중 시험 대상은 모델 외경에 +0.3mm를 더한 값입니다. S 시리즈 최대 하중 시험 대상은 모델 외경에 +1mm를 더한 값입니다. 하중 시험은 전문 측정 장비를 사용하여 측정합니다.
우리 사업







